Stepper Motors are a type of brushless DC motors, they're different to typical DC motors as they don't simply spin when voltage is applied. They're made from multiple phased coils which can be turned on/off quickly using a driver to create precise step movements in both directions. These phased coils break up a full rotation into much smaller precise part rotations often referred to as steps. Unlike standard DC motors stepper motors will stay secure in their current position if they lose a control signal until power is removed.

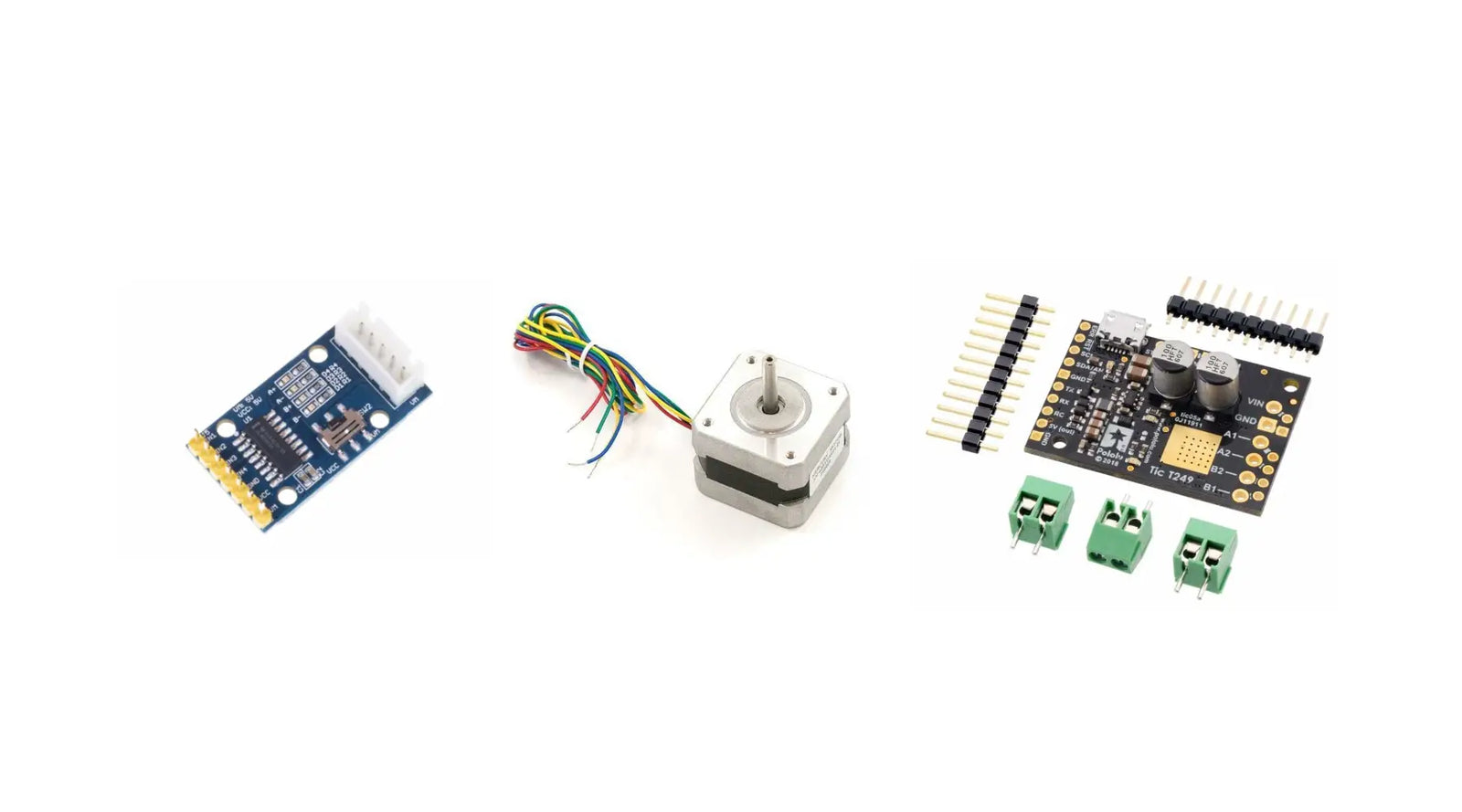
Stepper Motor with Cable (SKU: 469)
Pros and Cons
The ability to move in small, precide incriments makes stepper motors ideal for uses with XY plots such as CNC machines and 3D printers. They're often also used in robotics and automation due to their speed control and ability to provide max torque at low speeds.
Like anyting there are some downsides to using a stepper motor. They're less effifcient than other types of motors and typically run quite hot during operation. They also don't have any integral feedback on their position which means homing switches are often used when using stepper motors in XY plotters.
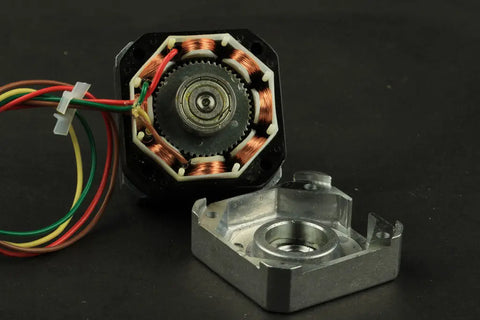
How Works?
Instead of spinning coil like other motors, a stepper motor uses magents in the centre with wire coils surrounding it. These coils are grouped into phases which determines the step size of the motor. Energising these coil phases in sequence will cause the motor to rotate.
Types of Steppers by Bill Earl licensed under CC BY-ND 2.0.
The motor converts pulses in current from a driver into precide step movements by turning coils on/off almost instantly. Each driver pulse equates to one step of a full motor turn. As stepper motors use wire coils around a central magnet it can make part rotations (steps) extremely accurately and stop almost instantly.
Stepper motors come in a wide range of different coil configurations and phase types. The more phases a motor has the smaller the step size is meaning the resolution is higher. The most notible types of stepper motors are Unipolar and Bipolar.
Unipolar vs Bipolar
Unipolar: This type of motor energises the coils in same direction everytime, meaning two coils needed per phase in order to give unidirection. This means the internal circuitry is simple but more space and more connections are required. Typically these motors are easier to use and lower in cost.
Bipolar: These motors use a single coild winding per phase, the current is just reversed to give motion in the opposite direction. This means sone more complex circuitry is required but the motors are smaller. These motors are generally considered better than unipolar ones as they have more torque and are more efficient.
Controlling a Stepper Motor
Due to the specific way stepper motors work and are controlled you'll need to use a controller/driver to interface and use them. There are loads of options out there including HAT/Shields for Arduinos and Raspberry Pi boards as well as standalone USB controllers.