


Zumo 32U4 Robot (Assembled with 75:1 HP Motors)
£123.04 ex VAT
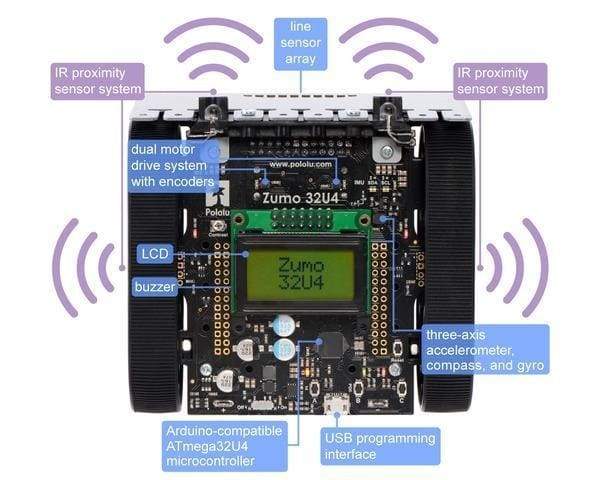
The Pololu Zumo 32U4 robot is a versatile tracked robot based on the Arduino-compatible ATmega32U4 MCU. It includes two 75:1 HP micro metal gearmotors along with integrated dual motor drivers, an LCD, quadrature encoders, line sensors, side and front proximity sensors for detecting objects, and a full IMU for detecting impacts and tracking orientation. The low-profile robot is less than 10cm x 10cm‚ small enough to qualify for Mini Sumo.
Please Note:
- No soldering or assembly is required.
- Just add 4xAA batteries and a micro-B USB cable and your Zumo is ready for programming.
The Zumo 32U4 is a highly integrated, user-programmable and customizable tracked robot. It measures less than 10 cm on each side and weighs approximately 275g with batteries (170g without), so it is both small enough and light enough to qualify for Mini-Sumo competitions, but its versatility makes it capable of much more than just robot sumo battles.
At the heart of the Zumo 32U4 is an Atmel ATmega32U4 AVR microcontroller, and like our A-Star 32U4 programmable controllers, the Zumo 32U4 features a USB interface and ships preloaded with an Arduino-compatible bootloader. A software add-on is available that makes it easy to program the robot from the Arduino environment, and we have Arduino libraries and example sketches to help get you started. A USB A to Micro-B cable (not included) is required for programming. For advanced users who want to customise or enhance their robots with additional peripherals, the robot's power rails and microcontroller's I/O lines can be accessed via 0.1‚-spaced through-holes along the sides and front of the mainboard.
The Zumo 32U4 features two H-bridge motor drivers and a variety of integrated sensors, including a pair of quadrature encoders for closed-loop motor control, a complete inertial measurement unit (3-axis accelerometer, gyro, and magnetometer), five downward-facing reflectance sensors for line-following or edge-detection, and front- and side-facing proximity sensors for obstacle detection and ranging. Three onboard pushbuttons offer a convenient interface for user input, and an LCD, buzzer, and indicator LEDs allow the robot to provide feedback.
- Pololu Zumo 32U4 Robot User Guide
- Zumo 32U4 pinout diagram
- Zumo 32U4 schematic diagram
- 3D model of the assembled Zumo 32U4 Robot
- Dimension diagram of the Zumo 32U4 Main Board
- Zumo 32U4 main board drill guide
- Zumo 32U4 robot 3D model
- Texas Instruments DRV8837/DRV8838 motor driver datasheet
- LSM303D datasheet
- L3GD20H datasheet
- Datasheet for the Sharp GP2S60 compact reflective photo interrupter
- Vishay TSSP77038 IR receiver module datasheet
- TPS2113A datasheet
- Zumo 32U4 Arduino library
- Zumo32U4 library documentation
- A-Star 32U4 repository on GitHub
- ATmega32U4 documentation
- Using the L3GD20 gyroscope in control systems